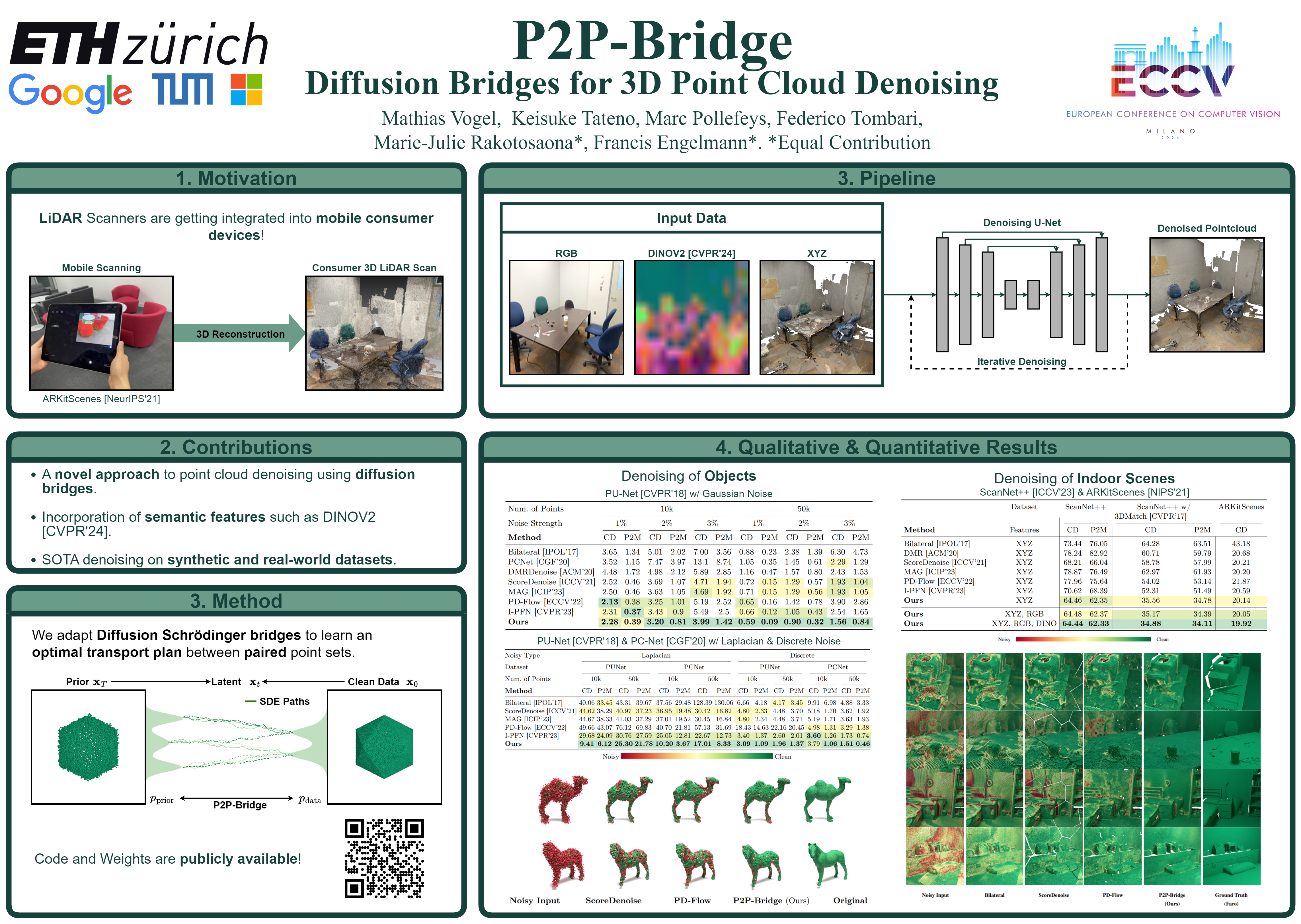
P2P-Bridge
Diffusion Bridges for 3D Point Cloud Denoising
ECCV 2024
1ETH Zürich
2Google
3TUM
4Microsoft
*Equal contribution
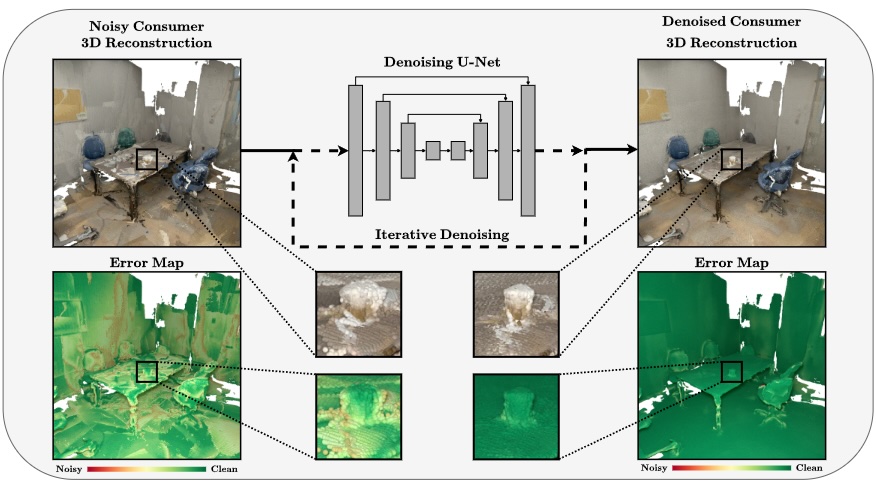
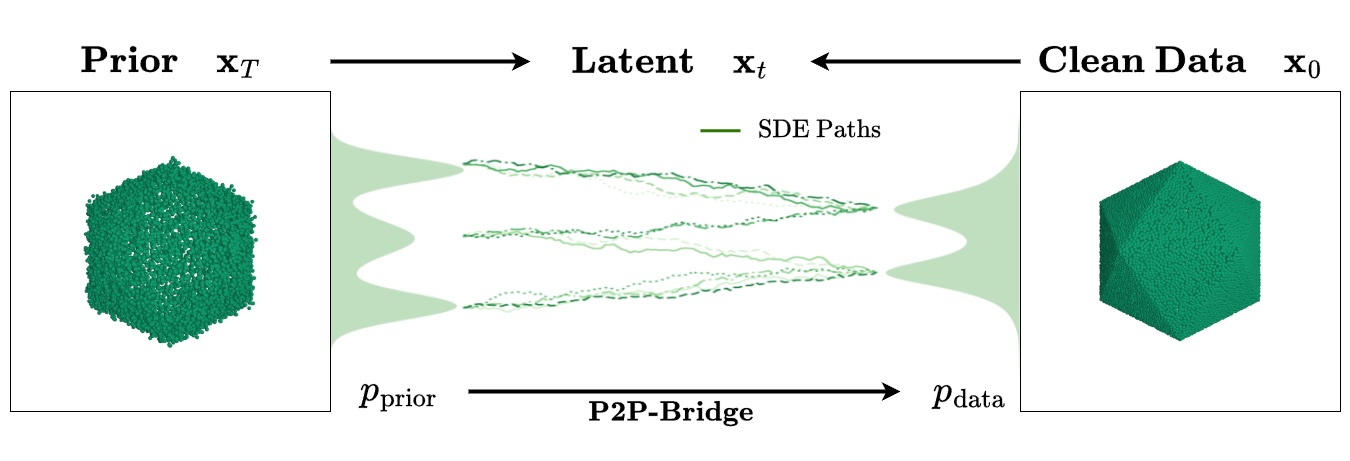
P2P-Bridge introduces a novel approach for point cloud denoising by adapting Diffusion Schrödinger bridges to learn an optimal transport plan between paired point sets. Further enhancements are possible by incorporating additional features such as RGB data and point-wise DINOV2 features.


{kind=link}